
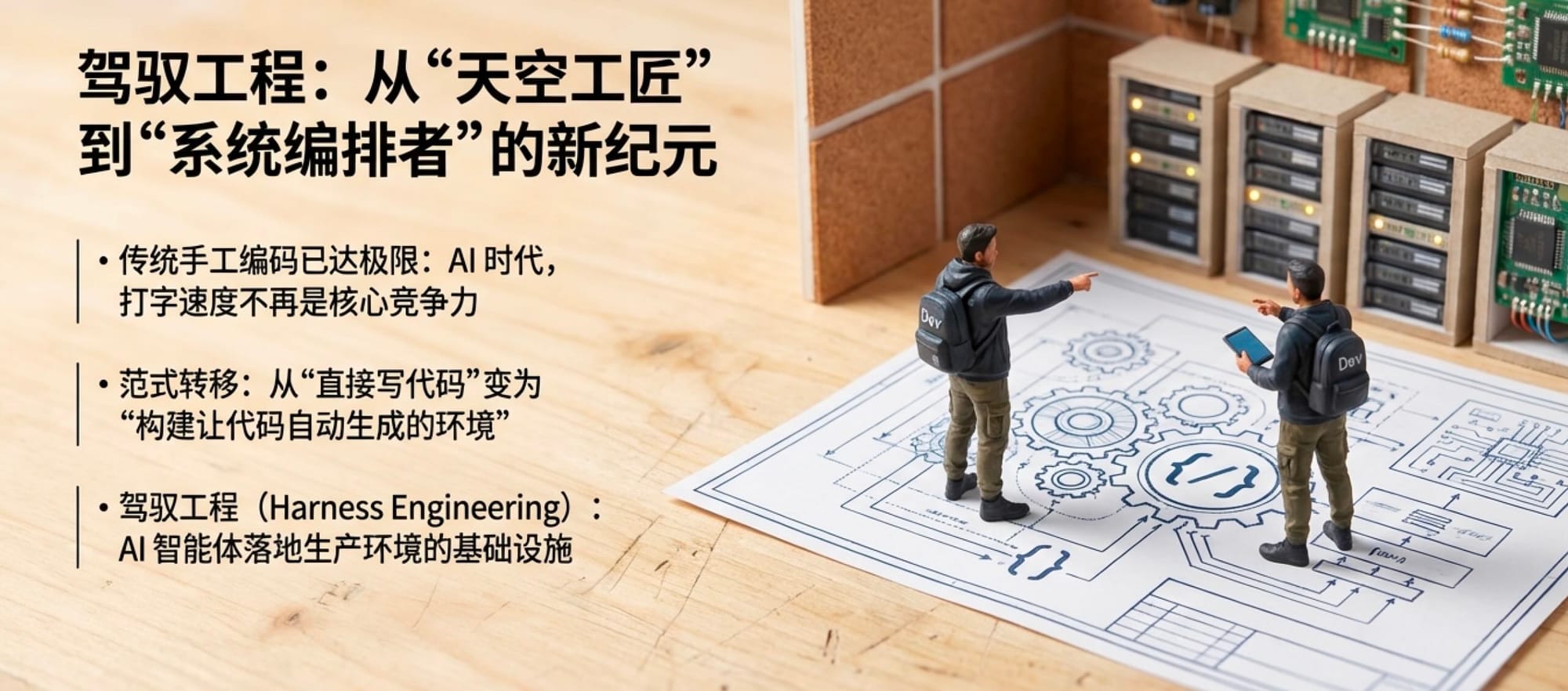
软件工程的演进历程始终伴随着抽象层级的提升。从直接操作硬件寄存器的汇编语言,到高级程序设计语言,再到云原生时代的微服务架构,每一代范式的更迭都旨在降低人类工程师的心智负担,提升系统构建的效率。然而,随着生成式人工智能(AI)和自主智能体(AI Agents)的介入,传统的“手工编码”模式正面临前所未有的范式挑战。在这种背景下,驾驭工程(Harness Engineering)作为一种全新的软件工程范式应运而生。它不再关注软件代码本身的编写,而是致力于构建一个能够让软件被自动生成的环境。驾驭工程的本质在于创造边界、脚手架、反馈循环和架构约束,使得AI智能体能够在这些约束下可靠地执行软件任务。
范式转移:从工匠模式到系统编排
驾驭工程的兴起标志着软件工程师角色的根本性转变。在传统范式中,工程师被视为“天空的工匠”,其核心竞争力在于对代码语法的精准掌控和逻辑实现的细腻雕琢。然而,这种模式正逐渐成为现代复杂系统开发的瓶颈。
历史镜像:F-16战斗机的启示
驾驭工程的逻辑核心可以追溯到航空工业的一次重大变革。早期的飞机飞行依赖于飞行员与机翼之间的物理连接,飞行员通过体力操控操纵杆来调整飞行姿态。但随着喷气式战斗机(如F-16)的出现,系统变得如此复杂且不稳定,人类的反应速度已无法实时完成保持飞行所需的数百次微调。工程师采取了一种激进的做法:在飞行员与机翼之间放置了一台计算机。飞行员不再直接操控飞机,而是向计算机发送请求,由计算机管理复杂的飞行补偿逻辑。飞行员的角色从“天空工匠”转变为“高度复杂系统的管理者”。

软件工程正经历类似的转变。随着系统规模迈向百万行级别,手动维护每一行代码的正确性已不再现实。驾驭工程将AI智能体置于工程师与底层代码之间,工程师不再直接编写代码,而是通过设计“驾驭层”(Harness Layer)来管理意图、指定约束并提供结构化反馈。这种转变强制我们重新审视工程的本质:工程从来不是关于打字速度或语法完美,而是关于理解问题、分解复杂性以及在性能、可维护性和灵活性之间做出权衡决策 。打字只是表达这些决策的媒介,而当AI能够捕捉意图并将其转化为工作代码时,真正的瓶颈始终在于思维而非打字。
驾驭工程的定义与核心逻辑
驾驭工程被定义为设计环境、脚手架和反馈循环的学科,这些环境使AI智能体能够自主且可靠地完成软件工作 。它将大型语言模型(LLM)视为系统的“引擎”,而将“驾驭”视为围绕引擎构建的“整车结构” 。正如马具(Harness)将马的原始力量转化为牵引力一样,软件驾驭层将模型的推理能力转化为具有生产力的软件产出 。
驾驭工程的核心组成部分包括控制构件、受调解的动作接口以及运行时策略。它解决的是生产部署中智能体系统面临的三大核心问题:持久且具备时间感知的记忆、结构化的领域知识以及与底层模型演进脱钩的框架无关接口。
驾驭工程的技术架构:CAR 分解模型
为了系统化地理解驾驭工程,研究界提出了 CAR 分解模型,即将驾驭层划分为控制(Control)、动作(Action)和运行时(Runtime)三个维度。这种结构化方法确保了智能体的行为既是受控的,又是可验证的。

控制构件(Control Artifacts)
控制层负责定义智能体的权限范围、任务目标和操作约束。这不再是简单的提示词工程(Prompt Engineering),而是涉及到一系列复杂的、机器可读的构件。
| 控制构件类型 | 功能说明 | 典型实例 |
|---|---|---|
| 系统提示词 | 定义智能体的身份、基本原则和不可逾越的红线。 | 架构指南、安全准则。 |
| 架构约束 | 机械化地强制执行依赖层级和领域边界。 | 类型 -> 配置 -> 仓库 -> 服务流程。 |
| 计划文件 | 存储任务分解步骤,作为智能体在多步执行中的“真北”。 | todo.md、执行计划映射表。 |
| 策略规则 | 基于代码的治理规则,自动评估配置和操作的合规性。 | OPA (Open Policy Agent) 策略。 |
在 OpenAI 的实验中,工程师通过编写文档字符串(docstrings)和断言(assertions)来定义控制层。智能体根据这些说明生成实现代码,如果断言失败,环境会自动捕获追踪信息并将其反馈给模型,触发自主修复循环。这种方式将模型从单纯的代码生成器转变为能够进行迭代的“虚拟工程师”。
受调解的动作接口(Action Interfaces)
智能体不应直接访问生产环境或本地文件系统。驾驭工程强调通过“受调解”的接口来执行操作。这意味着驾驭层充当了智能体与外部世界之间的防火墙。
- 沙盒化执行(Sandboxing):驾驭层为智能体提供安全的运行环境(如容器或受限的虚拟机),用于运行代码、安装依赖和执行测试 。这种隔离机制不仅保证了安全性,还允许环境按需创建和销毁,支持大规模并行任务处理 。
- 工具调用调解:通过模型上下文协议(MCP),驾驭层能够标准化工具的发现和调用过程 。当智能体发出 file_edit() 或 shell_run() 的请求时,驾驭层负责验证权限、记录日志并在执行后捕获结果返回给智能体 。
- 确定性挂钩(Hooks):在工具调用边界执行的 Shell 命令,用于拦截操作进行验证。例如,在代码提交前自动运行代码检查工具(Linter),如果不符合规范,则立即拒绝该操作并返回具体错误行号。
运行时策略(Runtime Policies)
运行时策略管理智能体的注意力、上下文预算和错误恢复。在长程任务中,模型的有效性高度依赖于驾驭层如何处理信息的流动。
- 上下文管理与压缩:由于 LLM 的上下文窗口是有限且宝贵的资源,驾驭工程采用“上下文工程”技术。当输入输出比例达到 100:1 时,系统会实施压缩分级制度:优先保留原始关键上下文,次之采用保留路径(如 URL 或文件路径)的压缩方案,最后才是总结(Summarization) 。
- 状态外部化:为了防止智能体在多轮会话中“遗忘”目标,驾驭层将状态存储在外部文件系统中 。这种做法使得即使上下文重置,智能体也能通过读取md 等外部构件快速恢复进度 。
- 重试与恢复逻辑:生产级驾驭层必须具备优雅处理模型幻觉、API 超时或工具失败的能力。常见的策略包括:使用相同提示词的简单重试、基于错误反馈的重新格式化重试、路由到不同模型的备选方案,以及在多次尝试失败后上报人类操作员 。
OpenAI 案例深度解析:驾驭工程的实证力量
OpenAI 进行了一项为期五个月的内部实验,旨在验证在完全不手动编写源代码的情况下构建复杂产品的可行性。这一实验成为了驾驭工程范式的基石案例。
实验设计与执行
三名工程师组成的核心团队负责开发一个包含约 100 万行代码的内部产品。实验设定了一个毫不妥协的规则:人类不得输入一行手动代码。相反,他们利用名为 Codex 的智能体组,通过声明式提示词定义任务。
工程师的工作重心从实现逻辑转向了设计环境。他们构建了一个标准的驾驭系统,涵盖了应用逻辑、文档编写、CI 配置、观测性设置和专用工具集。在这个系统中,Codex 智能体直接与开发工具交互,自主开启拉取请求(PR)、评估更改并迭代,直到满足任务标准。
实验成果与性能对比
实验结果证明,驾驭工程能够带来显著的效率提升和质量保障。
| 维度 | 传统 AI 辅助模式 (如 GitHub Copilot) | 驾驭工程模式 (OpenAI Codex 实验) |
|---|---|---|
| 代码编写主体 | 人类工程师 (AI 提示补全) | AI 智能体 (根据环境约束自主生成) |
| 开发周期 | 受到人类打字和审查速度限制 | 10倍速的交付提升 |
| 质量保证 | 依赖手动测试和人工代码审查 | 机械化强制执行的架构边界和自动断言 |
| 文档与同步 | 文档往往滞后于代码实现 | 文档作为智能体的单一事实来源,机械化验证一致性 |
OpenAI 报告指出,这种模式将人类工程师从琐碎的基础设施编排中解放出来,使其能够专注于研究和产品开发。更重要的是,通过在驾驭层编码脚手架和反馈循环,系统能够自主重现错误、提出修复建议并验证结果,实现了闭环的自主工程。
驾驭工程 vs. 传统范式:深度对比分析
驾驭工程并非对 DevOps 或平台工程的替代,而是对这些范式在 AI 时代的进化和重新定义。理解它们之间的细微差别对于企业构建现代工程团队至关重要。
与 DevOps 的关系
DevOps 强调开发与运维之间的文化融合与流程自动化。然而,DORA 2024 研究发现了一个“生产力悖论”:虽然个人层面的 AI 采用率增加了,但组织层面的吞吐量和稳定性却可能出现下降(吞吐量 -1.5%,稳定性 -7.2%)。这是因为传统的 DevOps 结构尚未准备好处理 AI 生成的大量“代码洪流”。
驾驭工程通过提供更严密的结构化框架来解决这一悖论。在驾驭范式下,DevOps 的角色从管理部署流水线转变为构建和维护“金领路径”(Golden Paths)模板,这些模板编码了组织执行的最佳实践,供智能体直接消费。
与平台工程的关系
平台工程专注于为人类开发人员构建内部开发者平台(IDP),以改善开发者体验并简化基础设施使用。相比之下,驾驭工程的“用户”主要是 AI 智能体 18。
| 特性 | 平台工程 (Platform Engineering) | 驾驭工程 (Harness Engineering) |
|---|---|---|
| 核心目标 | 提高人类开发者的生产力和自助服务能力。 | 确保自主智能体在复杂环境中的可靠性和效率。 |
| 典型构件 | 服务目录、IDP 门户、IaC 模板。 | 智能体脚手架、记忆系统、受控执行沙盒。 |
| 交互媒介 | 图形界面 (GUI)、命令行 (CLI)。 | 机器可读的构件、API、结构化文档。 |
| 对复杂性的处理 | 抽象基础设施,使其易于人类理解。 | 结构化环境信息,使其易于机器检索和推理。 |
平台工程提供了工厂的“设备”,而驾驭工程定义了工厂的“全自动流水线规约”。
驾驭工程的技术演进路径:2023-2026
从简单的聊天机器人到复杂的自主工程系统,驾驭工程经历了一个清晰的演进过程。这一路径反映了我们对 AI 能力认知的深化。
- 提示词工程时代 (2023):核心在于词汇的精准度。人们试图通过精妙的措辞(如“让我们一步步思考”)来引诱模型产生更好的结果。这一阶段的输出主要是提示词文本,其 marginal returns 现已趋于平缓 。
- 上下文工程时代 (2025):重点转向动态信息的组装。系统开始通过 RAG(检索增强生成)等技术为模型提供相关的背景信息。此时的核心问题是“模型需要什么信息?” 。
- 驾驭工程时代 (2026):关注整个执行环境和系统行为。开发者不再仅仅是好的提示词作者,而是成为了驾驭工程师,设计能够让多步系统稳定运行的认知基础设施 。
这一演进意味着模型的原始智能已不再是瓶颈,真正的竞争优势在于谁能构建最稳定、最高效的驾驭层。Manus 公司通过四次重构其智能体框架,发现最大的增益来自于减少用户侧复杂性并增加针对性的驾驭基础设施(如上下文压缩和 Logit 屏蔽),这一发现助力其被 Meta 以 20 亿美元收购。
记忆架构:驾驭工程的长期支柱
AI 模型本质上是无状态的,而工程项目则是长期的、具有上下文关联的。驾驭工程通过构建多层次的记忆系统来弥补这一缺陷。
记忆分层模型
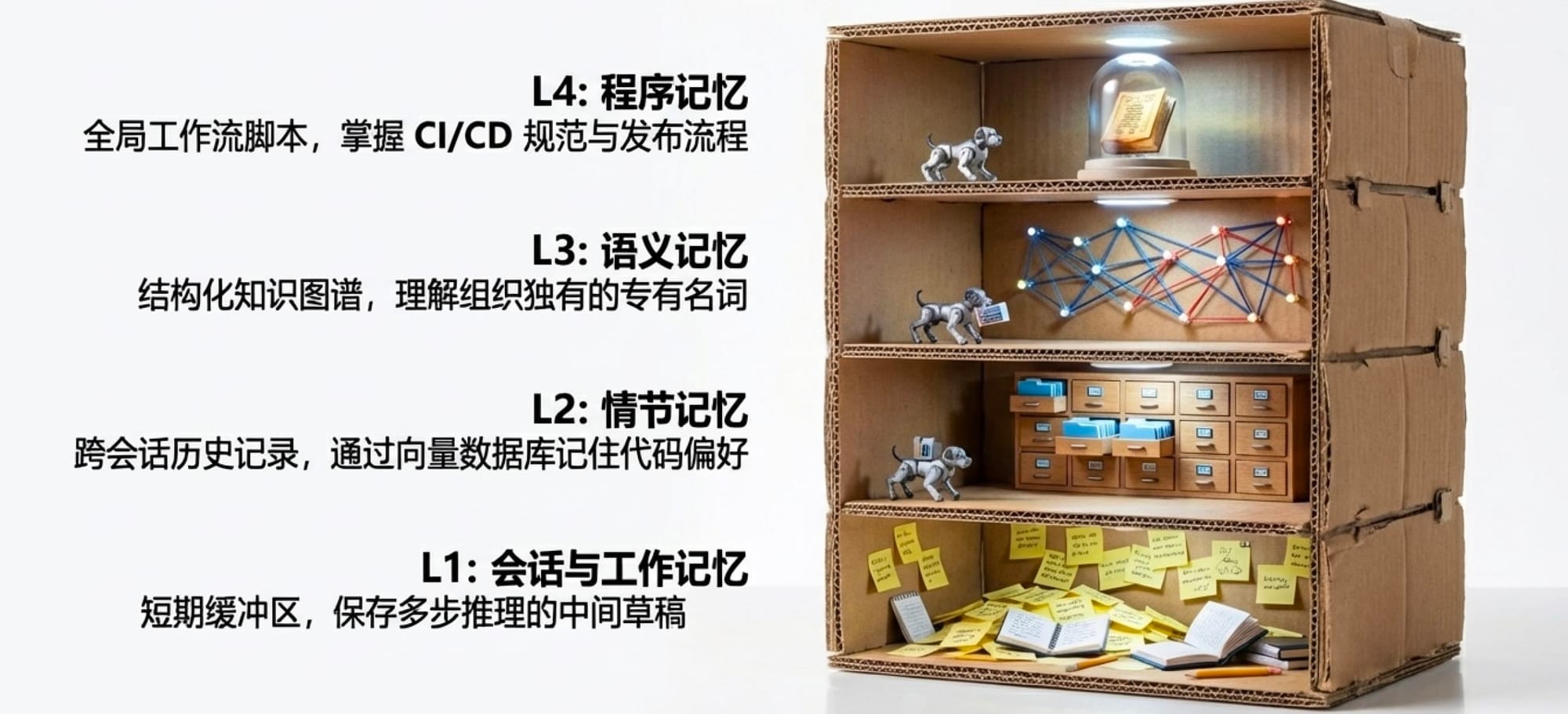
| 记忆类型 | 范围 | 实现机制 | 应用场景 |
|---|---|---|---|
| 会话记忆 | 单次交互/任务。 | 消息历史缓冲区、KV 缓存优化。 | 保持当前的对话连贯性。 |
| 工作记忆 | 正在进行的复杂任务。 | 外部草稿板、Key-Value 存储、todo.md。 | 多步推理中的中间状态保存。 |
| 情节记忆 | 跨会话的历史记录。 | 向量数据库 + 历史总结。 | 记住用户的偏好和过去的交互风格。 |
| 语义记忆 | 全局领域知识。 | 结构化知识图谱、RAG 知识库。 | 理解组织特有的术语和架构决策。 |
| 程序记忆 | 全局工作流。 | 工具定义、示例、工作流脚本。 | 掌握组织特有的开发规范和发布流程。 |
特别值得注意的是“时间感知记忆”。在企业环境中,事实是会随时间变化的。驾驭工程必须记录事实何时变为真实以及何时失效,以防止智能体产生基于过期信息的错误决策。
安全与治理:从 DevSecOps 到 AI 原生防御
AI 加速了软件交付速度,但也放大了现有的弱点。提示注入、模型越狱、不安全的 AI 生成代码以及 AI 工具导致的配置漂移,都是驾驭工程必须正面应对的安全挑战。

“默认安全”的 AI 交付框架
驾驭工程引入了一个四柱框架,将安全性和情报直接整合到工作流中:
- 情境情报 (Contextual Intelligence):流水线需要理解变更的深层含义。不仅是代码变了,还要理解为什么变,以及这种变化如何影响运行时行为 。
- 自动验证 (Automatic Verification):在部署前,利用数字签名和来源验证确保每一个模型输出、每一个配置文件和每一个构件的完整性与信任链 。
- 基于行为的异常检测:由于 AI 故障往往表现为行为异常(如逻辑漂移),驾驭层通过遥测数据(日志、指标、追踪)实时监测智能体行为与预期基准的偏差 。
- 持续学习循环:利用真实的流水线数据不断强化防御规则。每发生一次事件,系统都会自动更新验证策略,使“安全”定义能够动态进化 。
驾驭工程的成熟度模型与实施路线图
对于试图采纳驾驭工程的团队,可以参照以下成熟度路径进行评估和推进。
成熟度等级划分
- 等级 1:初始自动化:建立基本的智能体循环,能够执行简单的语法检查和单元测试生成。此阶段的核心是减少重复性劳动 。
- 等级 2:情境化构建:引入持久化状态管理和可重现的测试环境。确保并行任务不会相互干扰 。
- 等级 3:环境可读性 (Agent-Legible):将应用程序的内部状态、错误日志和性能指标以结构化方式暴露给智能体,使其能够进行有效的根因分析 。
- 等级 4:自主治理与反馈:系统能够自动监控质量信号(如回归频率、修复时间),并在指标下降时自动向智能体反馈,触发自我清理循环 。
- 等级 5:全自主软件工厂:智能体能够处理复杂的 Bug 修复循环、大规模遗构迁移和架构优化,人类仅负责在关键节点进行意图批准 。

实施指南:从 QA 流程切入
由于 QA(质量保证)本身具有极强的规范性和可验证性,它通常是驾驭工程落地的首选切入点。
- 第一步:审计部落知识。找出所有隐藏在 Slack 或资深员工头脑中的质量标准,将其转化为版本化的、机器可读的代码规范 。
- 第二步:机械化执行 top-5 规则。例如“所有 API 终点必须有集成测试”。将这些转化为 CI 门禁,确保智能体必须通过这些硬性约束 。
- 第三步:分层披露文档。将庞大的文档库拆解为结构化、分层的导航映射。智能体先读取索引文件,再根据指针深入特定领域的详细文档,避免模型被过量信息淹没 。
经济与组织影响:黑暗软件工厂的崛起
驾驭工程的广泛应用正催生出一种被称为“黑暗软件工厂”(Dark Software Factory)的交付模式。在这种模式下,软件交付变得高度自主,人类的工作重点发生了根本性的偏移。
“生产力悖论”的消解
传统的 AI 工具仅仅提高了“打字速度”,这在整体交付链路中往往只是微小的改进,甚至可能因为增加了审查负担而导致总效率下降。驾驭工程通过“意图思维”(Intent Thinking)重新定义了效率。波士顿咨询(BCG)的研究显示,采用驾驭工程范式的领先企业,在百万行级产品的开发中实现了 10 倍速的增益,同时显著降低了技术债务。
人才结构的重塑
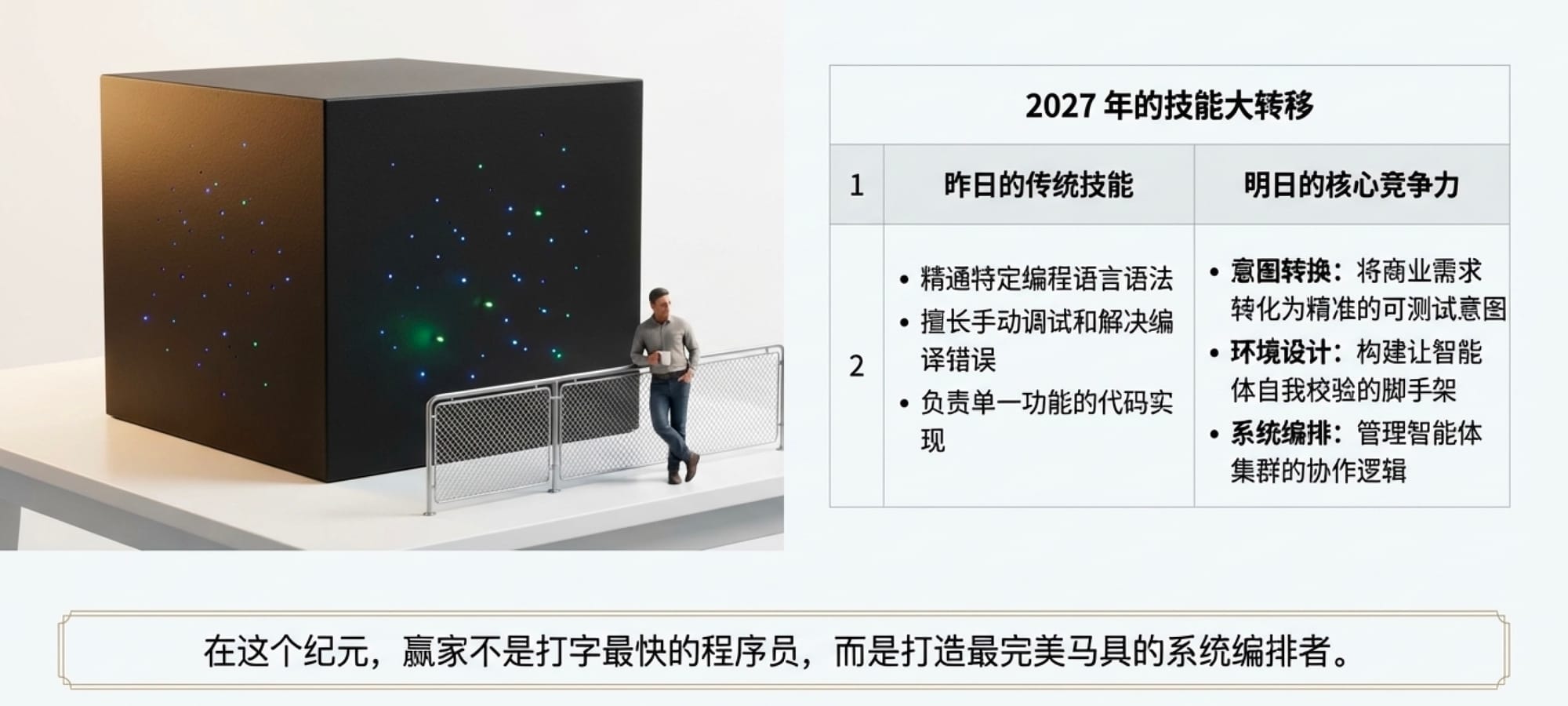
工程师的技能需求正从“代码实现者”向“意图架构师”转型。预计到 2027 年,80% 的软件工程师需要重新进行技能培训。
| 传统软件工程师技能 | 驾驭工程师必备技能 |
|---|---|
| 精通特定编程语言语法。 | 意图转换能力:将商业需求转化为精准、可测试的意图说明。 |
| 擅长手动调试和解决编译错误。 | 环境设计能力:构建能让智能体自我校验和修复的脚手架。 |
| 负责单一功能的代码实现。 | 系统编排能力:管理智能体集群的协作逻辑和状态一致性。 |
| 代码审查 (Reviewing code)。 | 模式识别与风险评估:识别智能体输出中的结构性风险。 |
挑战与未来展望
尽管潜力巨大,驾驭工程仍面临诸多挑战。其中最核心的是“松散结构软件”(Loosely-Structured Software, LSS)所带来的不确定性。
技术瓶颈
- 视图受限 (View-boundedness):由于上下文窗口的物理限制,如何为每个执行步骤构建一个“精选视图”,使其既包含足够的信息又不产生干扰,依然是一个活跃的研究领域 。
- 协作认知差距:在大规模多智能体系统中,智能体之间往往缺乏明确的供需模型,导致协调开销超过了其贡献的效用 。
- 内生演进风险:当系统的核心逻辑存储在可读可写的“技能文件”(Artifacts)中而非不可变代码中时,系统的稳定性依赖于极其严密的驾驭层约束,否则系统可能会发生非预期的演化 。
未来的发展方向
未来的驾驭工程将朝着“框架无关”的方向发展。随着 MCP(模型上下文协议)等标准的普及,驾驭层将成为企业资产的一部分,不随底层 AI 模型的更换而过时。此外,正如 LangChain 的实验所示,通过优化驾驭结构而非更换模型,性能可以提升近 14 个百分点,这表明在未来几年,驾驭层的设计水平将成为区分卓越工程团队与普通团队的关键指标。
驾驭工程(Harness Engineering)不仅是工具链的升级,更是对软件工程第一性原理的回归。它承认了人类思维在解决问题、权衡决策中的核心地位,同时利用 AI 的生成能力消除了实现过程中的繁琐低效。通过构建 CAR 架构下的控制、动作和运行时机制,驾驭工程为自主软件交付提供了急需的确定性和可靠性。
随着“黑暗软件工厂”模式在 OpenAI、Spotify 和 Stripe 等领先组织中的成功实践,这一范式正迅速向传统行业渗透。对于企业而言,当前的战略重点不应仅仅是“引入 AI 工具”,而应是投资于驾驭基础设施的建设,将组织的制度、规范和架构决策编码进可由机器理解的驾驭层中。在这个由 AI 驱动的新纪元,赢得竞争的将不是那些打字最快的程序员,而是那些能够设计出最卓越、最稳健“驾驭马具”的系统编排者。